Skip to content
回首頁
校首頁
本系首頁
網站管理
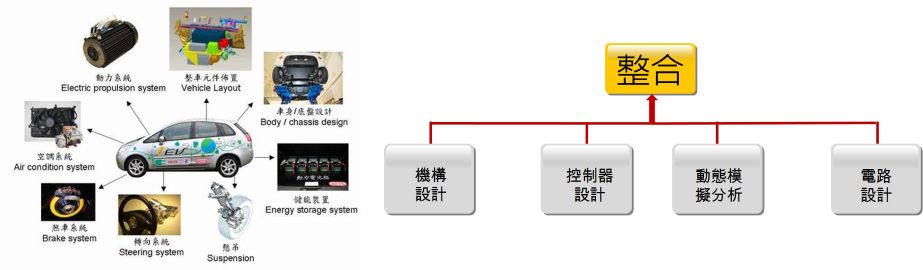
電動車輛實驗室
實驗室介紹
指導教授介紹
成員介紹
研究主題
聯絡方式
輪椅尾曳輔助輪驅動控制技術
➔
將開發無力量感測器之動力輔助輪控制技術,藉由電動馬達機電耦合特性,透過電流訊號之觀測器架構,得以偵測使用者推力大小,並即提供輔助力矩,實現具有省力操作功能之動力輪椅輔助系統。