電動車輛實驗室
 |
|
|
|
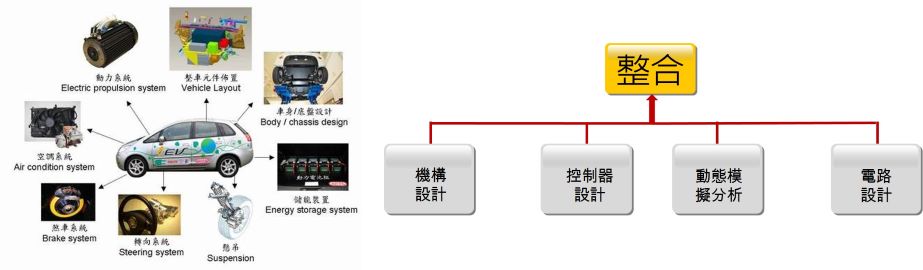
研究主題
➔本專題所開發的電動車是以兩顆直留有刷馬達至於車體上提供整車驅動力,以石龜皮帶來動動力給驅動輪,然後設計控制器,分別控制兩顆驅動馬達之動力,以便進行直線穩定控制,以及車輛過彎之差速控制。 ➔本專題所開發的電輔助手推車是以直流無刷馬達裝置於車體,當使用者推動車體時,車輪馬達亦可提供適當驅動輔助力或煞車力,以達到省力省時之功效。專題內容包含設計馬達控制器與驅動器,以控制馬達之動力,以及force sensor使用與機構安裝等。 ➔本專題設計及製作一部具有懸吊系統的兩輪平衡車。專題內容包含機構設計、分析與製作,以整車平衡控制法則設計、動態模型模擬分析、電路與感知器使用安裝等。 ➔本專題設計及製作一部可自我平衡遙控機車。即利用陀螺效應,判別車身傾倒方向,並施加一個輔助平衡力矩,達到車身平衡。專題內容包含機構設計、分析與製作,以整車平衡控制法則設計、電路與感知器使用安裝等。 ➔L6電動車動力系統開發,包含動力系統設計與開發、自動手排變速箱設計與控制策略、整車控制程式撰寫、驅動與電子煞車回充系統設計。 ➔懸吊的性能主要影響了車輛的乘坐的舒適性以及操控的穩定性。 ➔本研究設計出能發電的半主動式避震系統,主要是能將來自路面的震動吸收,而提供不同阻尼,提高乘坐的舒適性,還可以將吸收的震動轉換成電能儲存。 ➔機構設計主要將懸吊的直線運動轉換成旋轉運動,並利用減速比以及單向軸承,不論加縮或伸張皆能帶動發電機轉動。 ➔改變阻尼力的大小是透過skyhook 理論以及電流控制,以提高舒適性。 ➔設計開發無人力介入的 ASG 系統。 ➔低成本與操作便利性佳。 ➔解決市區走走停停時,反覆起動&熄火之不便性。 ➔無刷馬達如以位置感測器當作馬達驅動方法,目前最大的問題在於位置感測器容易在高溫環境中失效,且不易更換。 ➔研擬出一套簡易的無感測器驅動方法,並有效的提高此技術的驅動效率。 ➔將建置DCT測試平台,發展其控制系統核心技術,包括起步控制策略的制定、綜合智慧換檔規律的研究以及上下坡換檔品質的改善等。 ➔將通過理論建模和試驗的方式對氣壓電磁閥的動態特性進行深入細緻的分析,可為閥體的結構參數設計、改進及閥體的動態性能評價提供了一套的理論依據。 ➔將開發無力量感測器之動力輔助輪控制技術,藉由電動馬達機電耦合特性,透過電流訊號之觀測器架構,得以偵測使用者推力大小,並即提供輔助力矩,實現具有省力操作功能之動力輪椅輔助系統。 ➔針對田畦間農用機器人動力底盤機架進行設計研究,該機器人主要功能是能夠實現圖像視覺自主引航、作物土壤監察、田間鋤草、變量噴霧灑水等作業。 ➔本專題主要是以電池端點電壓及充放電電流作為鋰電池殘電容量估測依據,並針對電池使用特性以開路電壓法搭配庫倫積分法以及運用卡爾曼濾波器改善鋰電池殘電量估測精度。 |